
")
El pipe jacking es un método de excavación en el que se utiliza una tubería instalada como soporte del terreno durante la operación de excavación. En este método, se bajan secciones de tubería en el pozo de lanzamiento y se empujan hacia adelante utilizando gatos en el pozo de lanzamiento a medida que avanza el túnel. En la cara de excavación, se pueden utilizar una variedad de equipos y configuraciones según las condiciones del terreno y del agua subterránea. En condiciones de terreno bueno, un cilindro de acero empujado por delante de las secciones de tubería proporciona una protección inmediata del terreno y la cara puede permanecer lo suficientemente estable para la excavación manual o mecánica sin necesidad de medidas especiales de soporte de la cara. En condiciones de terreno más difíciles, puede ser necesario un soporte parcial de la cara o un sistema de excavación cerrado que utilice lodo para el soporte de la cara o un sistema de equilibrio de presión del terreno (EPB).
La diferencia clave con la excavación convencional es que el soporte lateral del terreno para el túnel es proporcionado por las tuberías empujadas desde el pozo de lanzamiento en lugar de que el soporte del terreno del túnel se instale justo detrás de la cara del túnel. En el pipe jacking, a medida que las tuberías se deslizan cada vez más a través del terreno, las fuerzas de fricción en las tuberías provocan un aumento en las cargas de empuje que deben aplicarse. Esto limita la longitud de las instalaciones de pipe jacking individuales que no están presentes en la excavación convencional. Sin embargo, con la preparación y el equipo adecuados, son posibles instalaciones largas con pipe jacking, siendo la instalación individual más larga realizada hasta la fecha de 2,5 km para una tubería de 3 m de diámetro interno en Alemania.
Microtunneling es una forma de instalación de tuberías de empuje. Se define como una operación de empuje de tuberías controlada remotamente y guiada que proporciona soporte continuo a la cara de excavación mediante la aplicación de presión mecánica o de fluido para equilibrar las presiones del agua subterránea y de la tierra. El soporte en la cara de excavación es una característica clave de microtunneling, que lo distingue del empuje de tuberías tradicional con escudo abierto. Microtunneling se utiliza para instalar tuberías debajo de carreteras, ferrocarriles, pistas de aterrizaje, puertos, ríos y áreas ambientalmente sensibles.
Originalmente, el término microtunelización se utilizaba para describir la excavación de túneles con diámetros en los que no se permitía la entrada de una persona (normalmente menos de 0.9 m o 1.0 m). Ahora, el término también se utiliza para describir el método (es decir, sin necesidad de que una persona entre) en lugar de un rango específico de diámetros. Aún existen diferencias regionales en el uso de la terminología.
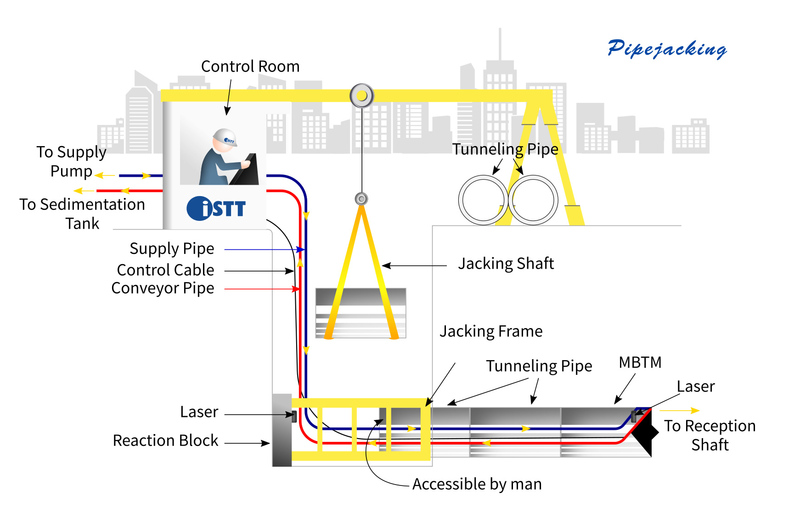
La siguiente descripción detallada se basa en una máquina de tipo lodo:
Microtunneling requiere pozos de jacking y recepción en los extremos opuestos de cada avance. El proceso de microtunneling es una operación cíclica de jacking de tuberías. Una máquina de perforación de microtúneles (MTBM) es empujada hacia la tierra por gatos hidráulicos montados y alineados en el pozo de jacking. Luego, los gatos se retraen y se desconectan las líneas de lodo y los cables de control. Se baja una tubería o carcasa de producto en el pozo e inserta entre el marco de jacking y el MTBM o la tubería previamente jacked. Se realizan conexiones de líneas de lodo y cables de alimentación y control, y se avanza la tubería y el MTBM otro golpe de avance. Este proceso se repite hasta que el MTBM llega al pozo de recepción. Al finalizar el avance, se recuperan el MTBM y el equipo de arrastre y se retira todo el equipo de la tubería. La mayoría de las operaciones de microtunneling incluyen un sistema de jacking hidráulico para avanzar el MTBM y la tubería, un sistema de lodo de circuito cerrado para transportar los escombros excavados, un sistema de limpieza de lodo para eliminar los escombros del agua de lodo, un sistema de lubricación para lubricar el exterior de la tubería durante la instalación, un sistema de guía para proporcionar control de línea y nivel, un sistema de suministro y distribución eléctrica para alimentar el equipo, una grúa para levantar secciones de tubería en el pozo de jacking, y varios camiones y cargadores para transportar los escombros fuera del sitio. Los MTBM tienen una cabeza de corte giratoria para excavar el material del suelo, un cono triturador para triturar partículas más grandes en tamaños más pequeños para su transporte a través de las líneas de lodo, un motor hidráulico o eléctrico para girar la cabeza de corte, una cámara de mezcla de lodo presurizada detrás de la cabeza de corte para mantener la estabilidad de la cara, una unidad de dirección articulada con gatos de dirección para correcciones de dirección, varias válvulas de control, manómetros de presión, medidores de flujo y un sistema de adquisición de datos. Además, el MTBM tiene cámaras en línea para transmitir información al operador y un sistema de objetivo para el control de guía.
Diferentes sistemas de control de tierra y transporte de escombros pueden ser utilizados dependiendo de las condiciones del terreno, el diámetro de la máquina, etc. Los sistemas de microtunelización basados en tornillos sin fin han sido utilizados y los sistemas de equilibrio de presión de tierra pueden ser sustituidos por sistemas de lodo en proyectos de microtunelización de mayor diámetro.
Control preciso de la línea y la pendiente se logra utilizando el sistema de guía y gatos de dirección para localizar y dirigir el MTBM durante una conducción de microtúnel. El sistema de guía generalmente consiste en un láser de referencia montado en el eje de empuje, que transmite un haz sobre un objetivo montado en la sección articulada del MTBM. Para proyectos de microtúneles curvos, se pueden utilizar sistemas de medición giroscópica combinados con sistemas de sensores de nivel de agua (para la alineación vertical). Estos datos y otra información operativa se transmiten a través de cables de alambre a una cabina de control ubicada en la superficie. Las máquinas de microtúneles son capaces de contrarrestar de manera independiente las presiones del suelo y las hidrostáticas. La presión del suelo se contrarresta mediante un control cuidadoso de las tasas de avance y excavación de los materiales de desecho. La presión del agua subterránea se contrarresta mediante el uso de lodos presurizados en la cámara de mezcla de suelos del MTBM.